点云曲面拟合matlab代码贝叶斯Quadrics 介绍 创建该存储库中的代码是为了使二次曲面适合点云,该云具有很大的噪声或丢失的数据部分。 在这种情况下,拟合无约束的二次曲面可能会导致出现不良曲面,例如双曲面,扁平...
”算法 3d matlab 点云曲面“ 的搜索结果
基于VTK的三维点云曲面重建研究
标签: 三维点云
针对三维点云数据重建效率低、不能实时交互等问题,利用鲁棒性强的Power Crust算法和三维可视化类库Visualization Toolkit(VTK)的良好并行机制与强大的图像处理能力,实现了三维点云数据曲面快速重建。该算法使用...

3.内容:通过包络提取算法获得三维点云数据的包络,从而实现点云到曲面的转换功能。通过包络提取算法获得三维点云数据的包络,将点云转换为三维曲面 4.注意事项:注意MATLAB左侧当前文件夹路径,必须是程序所在...
4.2-点云曲面重建
标签: 人工智能

PCL学习目录
该算法首先基于传统径向基函数隐式曲面重建算法对点云数据进行低解析度、低精度快速插值,然后采用三线性插值对点云数据进行高解析度、低精度插值,最后根据欧氏距离确定点云零水平集附近需要处理的区域,处理过程中只...
大数据-算法
大数据-算法
不同三维激光扫描角度下的凳子点云数据配准数据!用于icp算法配准的学习与参考
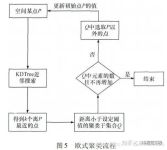
1. 维诺图 维诺图是对平面内n个离散点而言的,它是由一组由连接两邻点直线的垂直平分线组成的连续多边形组成。N个在平面上有区别的点,将平面划分为N个区域。 2. 维诺图的特点: ...
python点云处理算法整理

自由曲面点云三维坐标(对应所发布问题:曲面点云求交算法)
3维点云的配准基本算法,基于pcl库的icp算法程序

PCL学习笔记(四)——点云曲面重建
标签: 算法

点云分割_实现Ransac随机采样算法分割地面点云_优质项目实战
点云分割算法概述.pptx
标签: 算法 点云分割
最近在一些工作材料时,偶然翻到几年前写的一篇《点云分割算法概述》的PPT,当时把这些算法都实现了一下,现在读起来还是很有参考价值。现把它分享出来,供大家分享交流。
对点云进行聚类分割,已知点云的类数量,通过初始点来进行 点云分类,
类Poisson是对泊松曲面重建算法的实现,输入是带有法线的点云,输出为重建后的曲面模型数据,泊松曲面重建的实现是基于文献Poisson surface reconstruction。PCL库种surface模块是用来对三维扫描获取的原始。进行曲面...
3D-NDT(正态分布变换)算法是一种应用在同时定位和地图生成(SLAM)的机器人领域中的点云拼接算法。在SLAM中,点云初始拼接是通过机器人测距仪获取两个站之间初始变换完成的,然后采用3D-NDT算法进行精确拼接。地面三维...
利用SSD算法计算图像对视差,并求出三维点云坐标

基于ICP配准算法的三维点云数据的匹配仿真,matlab2021a仿真测试。 输出显示迭代收敛曲线,点云数据图,以及点云配准数据图
使用点云数据拟合曲面时,由于点云的数据量大、形状复杂的特点,如果使用传统的最小二乘法拟合可能会得到病态的曲面方程,从而导致较大的误差。而使用移动最小二乘法拟合点云不仅能够减少误差,提升局部的准确率,还...
在测量较小的数据时会产生一些误差,这些误差所造成的不规则数据如果直接拿来曲面重建的话,会使得重建的曲面不光滑或者有漏洞,可以采用对数据重采样来解决这样问题,通过对周围的数据点进行高阶多项式插值来重建...

关于介绍点云配准的文章,可以进行相关方面的初步了解。
推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地